For each point in the query, find the nearest k points in target using
K-D tree.
Arguments
- target
a matrix with
nrows (number of points) and 2 or 3 columns, or amesh3dobject. This is the target point cloud where nearest distances will be sought- query
a matrix with
nrows (number of points) and 2 or 3 columns, or amesh3dobject. This is the query point cloud where for each point, the nearestkpoints intargetwill be sought.- k
positive number of nearest neighbors to look for
- leaf_size
the suggested leaf size for the
K-Dtree; default is16; larger leaf size will result in smaller depth- max_depth
maximum depth of the
K-Dtree; default is64
Value
A list of two matrices: index is a matrix of indices of
target points, whose distances are close to the corresponding
query point. If no point in target is found, then NA
will be presented. Each distance is the corresponding distance
from the query point to the target point.
Coercing Surface Inputs
The surface objects are converted to 'mesh3d' object before
applying further calculations.
When surface is a surface ieegio object, the returned
mesh3d$vb contains vertices that have been left-multiplied by
surface$geometry$transforms[[1]] (the first transform stored in the
geometry, typically the ScannerAnat or voxel-to-world transform).
Breaking change: Earlier versions (before 0.2.6) of ravetools
returned the raw surface$geometry$vertices without applying any
transform, so downstream code often multiplied by
surface$geometry$transforms[[1]] (or an equivalent) manually before
working in world space. Such code will now double
apply the transform and produce incorrect coordinates. If you previously
applied a transform from surface$geometry$transforms by hand after
calling a ravetools mesh function on an 'ieegio_surface',
remove that manual step.
Surfaces with an empty or missing geometry$transforms list (for
example, surfaces produced by ieegio's volume_to_surface,
which stores an identity transform) are unaffected.
If geometry$transforms contains multiple transforms targeting
different coordinate spaces, only the first one is used. Callers that need
a specific target space should select and apply that transform themselves
before calling ravetools mesh functions.
Examples
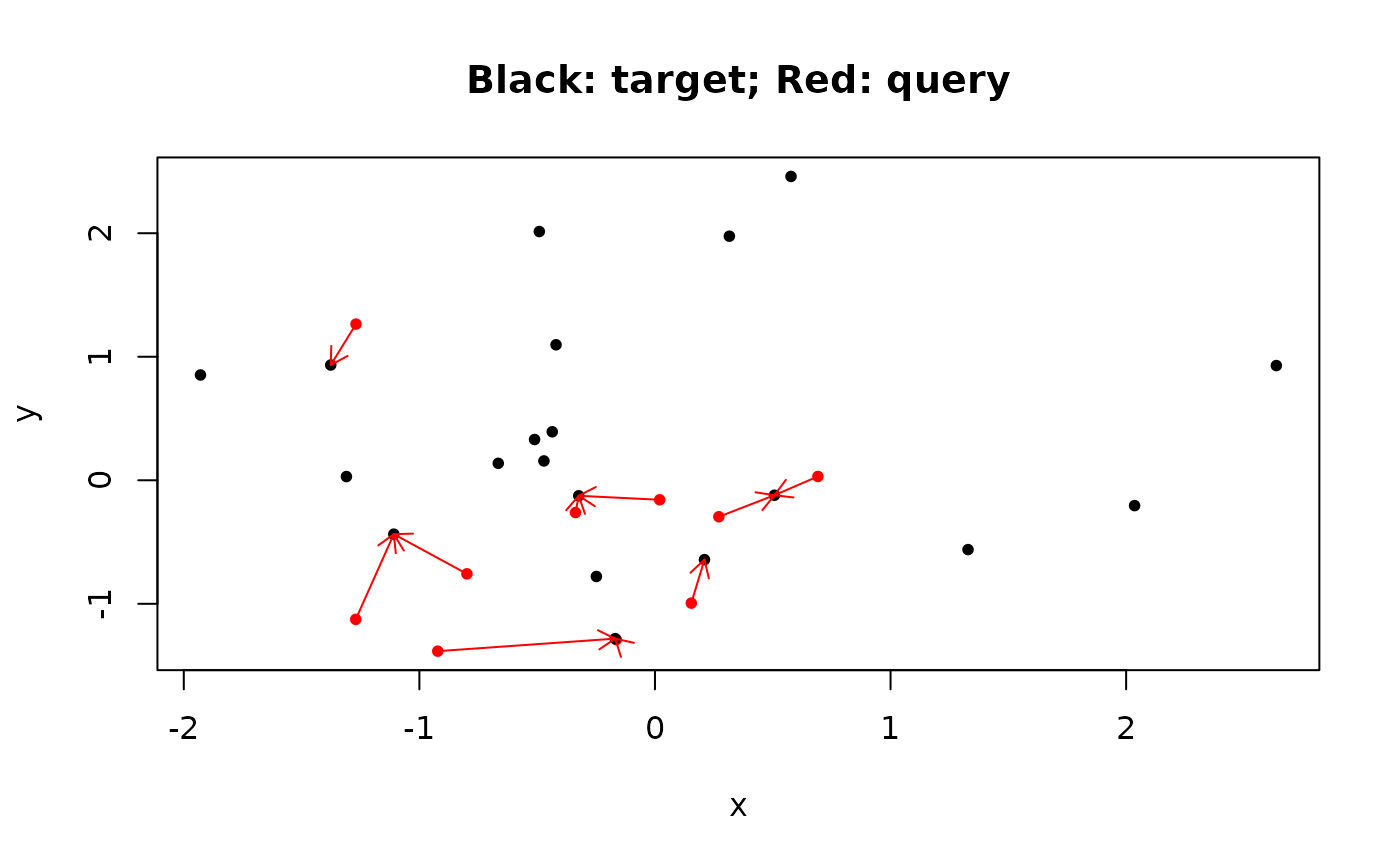
# Find nearest point in B with the smallest distance for each point in A
library(ravetools)
n <- 10
A <- matrix(rnorm(n * 2), nrow = n)
B <- matrix(rnorm(n * 4), nrow = n * 2)
result <- vcg_kdtree_nearest(
target = B, query = A,
k = 1
)
plot(
rbind(A, B),
pch = 20,
col = c(rep("red", n), rep("black", n * 2)),
xlab = "x",
ylab = "y",
main = "Black: target; Red: query"
)
nearest_points <- B[result$index, ]
arrows(A[, 1],
A[, 2],
nearest_points[, 1],
nearest_points[, 2],
col = "red",
length = 0.1)
 # ---- Sanity check ------------------------------------------------
nearest_index <- apply(A, 1, function(pt) {
which.min(colSums((t(B) - pt) ^ 2))
})
result$index == nearest_index
#> [,1]
#> [1,] TRUE
#> [2,] TRUE
#> [3,] TRUE
#> [4,] TRUE
#> [5,] TRUE
#> [6,] TRUE
#> [7,] TRUE
#> [8,] TRUE
#> [9,] TRUE
#> [10,] TRUE
# ---- Sanity check ------------------------------------------------
nearest_index <- apply(A, 1, function(pt) {
which.min(colSums((t(B) - pt) ^ 2))
})
result$index == nearest_index
#> [,1]
#> [1,] TRUE
#> [2,] TRUE
#> [3,] TRUE
#> [4,] TRUE
#> [5,] TRUE
#> [6,] TRUE
#> [7,] TRUE
#> [8,] TRUE
#> [9,] TRUE
#> [10,] TRUE